Aardbeiplukrobot
Deze aardbeiplukrobot moest, inclusief een behuizing in staat zijn op hoge snelheden aardbeien te plukken. Ook dienden een aantal deelproblemen herontworpen te worden, zoals een evenwichtsmechanisme voor de arm.
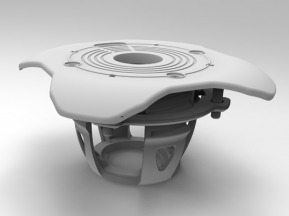
De architectuur is volledig herzien om zo productie en assemblage te vereenvoudigen. Alle switches en sensoren worden binnenin de robot verwerkt zodat deze een soort exo-skelet wordt. Hieraan kunnen dan vormgeeflijke elementen worden aangebracht.
Project specificaties
- Volledige plukbeweging binnen 3 seconden
- Bestand tegen temperaturen rond 70°C
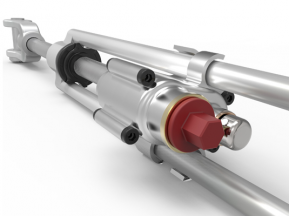
- Implementatie fysiek balanssysteem voor arm
- Potentieel voor andere tools op uiteinde arm
Project uitwerking
- Bestuderen en opmeten prototype
- Opzoekwerk rond slewing rings
- Berekeningen en principestudie rond evenwicht
- Samenwerking rond selectie motors
- Cable management
- Design sketches en vormstudie met
Vragen over dit bericht? Stel ze hieronder en we komen snel bij je terug!